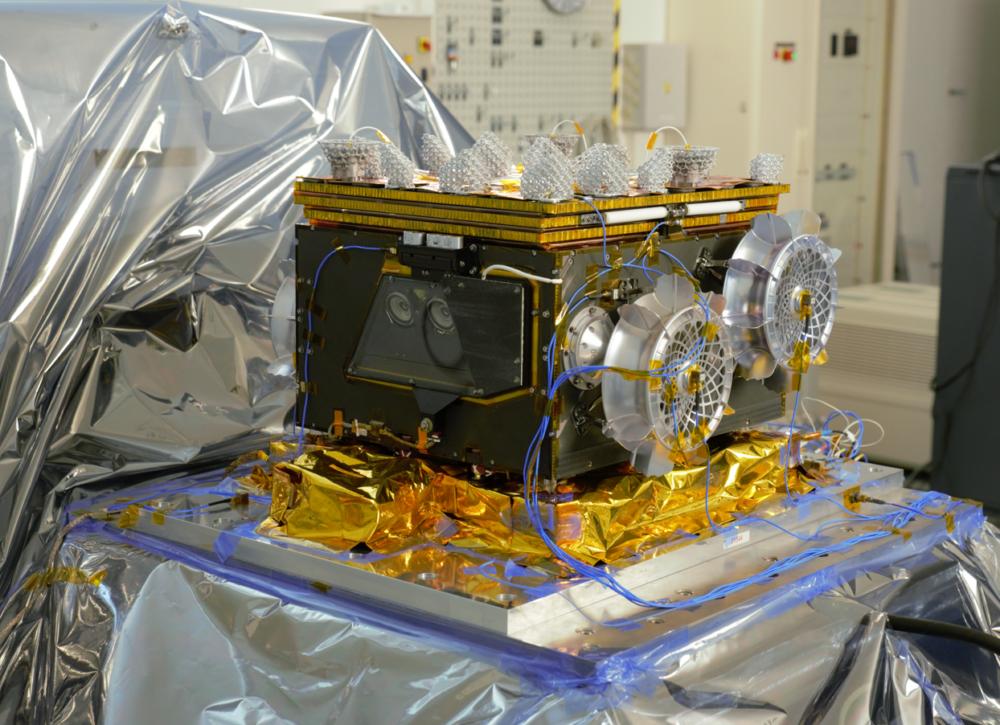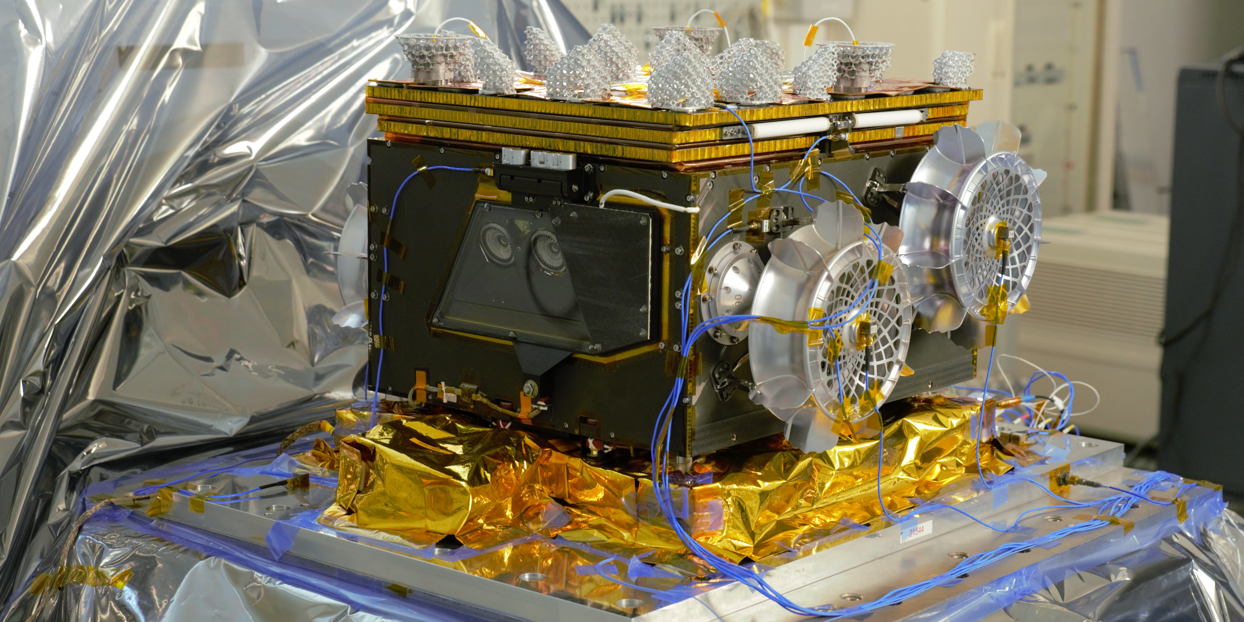
So oder ähnlich könnte der nächste „Asterix“-Band heißen. Hier geht es aber um den Rover „IDEFIX“, der im Rahmen der Japanischen Martian Moons Exploration (MMX) Mission ab 2027 die Oberfläche des Marsmondes Phobos erkunden und das Fahren unter Mikrogravitation demonstrieren wird. Die dabei gewonnenen Daten dienen zur Kalibrierung von Instrumenten auf dem MMX-Mutterschiff sowie zur Landungsvorbereitung. Dazu kommt noch das sogenannte Mechanical-Electrical-Communication and Separation System. Das MECSS verbindet den Rover während der Start- und Flugphase mit dem MMX-Mutterschiff und mit dem Lander-Kontrollzentrum. Beide Strukturen hat das Institut für Systemleichtbau entwickelt und gebaut.

Leichtbau mit System
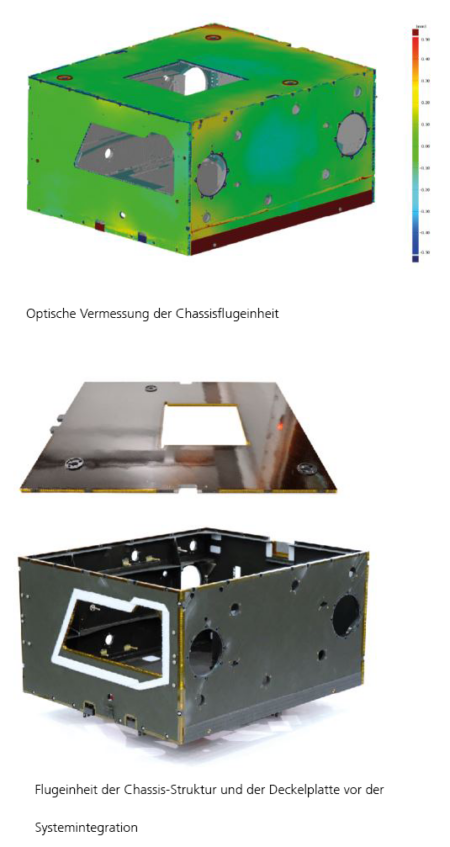
Die maximale Startmasse des Rovers darf 24,85 kg nicht überschreiten. Der Bauraum ist durch Nachbarinstrumente auf der Explorationsplattform der MMX-Sonde begrenzt. Während des Raketenstarts und der Landung auf Phobos wirken Beschleunigungen bis zum 28-fachen der Erdbeschleunigung auf den Rover. Wie bei einem Wurf landet der Rover ballistisch. Dabei ist die Energie des Landeaufpralls ohne Beeinträchtigung des Rovers zu absorbieren. Nach der Landung sind die mechanischen Lasten mit nur noch etwa 1/2000 der Erdgravitation vernachlässigbar klein. Die Rover-Struktur besteht aus über 160 miteinander verklebten Einzelteilen. Chassis und Interface-Struktur in CFK-Aluminium-Sandwichbauweise sind maximal steif und halten die Strukturmasse so gering wie möglich. Zusätzliche CFK-Versteifungsrippen auf der Innenseite dienen der weiteren Aussteifung und Lastverteilung.
Die Deckelplatte des Rovers ist besonders beansprucht und muss über einen extremen Temperaturbereich von -145 bis +75 °C formstabil bleiben. Dabei auftretende Eigenspannungen können zu Mikro-Rissen im Material oder Verklemmungen führen. Der Vorteil von CFK: Die Wärmedehnung ist extrem gering. Verbindungen zu Aluminiumteilen mit 10-fach höherer Wärmedehnung erfordern besondere Lösungen, wie besonders elastische Klebstoffe und darauf zugeschnittene Fügestellen. Für Kabelhalterungen lassen sich zum Beispiel besonders gut isolierende und sehr dehnbare Aramid- und Glasfasern einsetzen. Alle Einzelteile der Deckelplatte müssen mit Ausnahme der hochisolierenden obersten Schicht elektrisch miteinander verbunden sein. Zum Rest des Chassis ist eine nahezu vollständige elektrische Isolierung erforderlich. Die Deckelplatte mit den Solargeneratoren und ihrer Elektronik muss rund 16 % der Rover-Gesamtmasse tragen. Der Masseanteil der Deckelplatte (324 g) am voll ausgerüsteten Rover (23,12 kg) beträgt nur 1,5 % und zeigt den enormen Leichtbaucharakter dieser Teilstruktur.
Auf- und davon
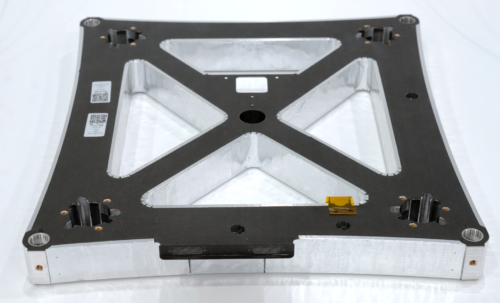
Die zweite am Institut für Systemleichtbau entwickelte und gebaute Hauptstruktur ist die des Mechanical-Electrical-Communication and Separation System MECSS. Die ungewöhnlich anmutende X-Form und Höhe der CFK-Sandwichkonstruktion ergibt sich daraus, dass das Separationssystem im MECSS integriert ist. Es besteht aus einem Halte- und Trennmechanismus mit lösbaren Bolzen in jeder der vier Ecken. Damit sind Rover und MECSS während der Start- und Flugphase fest mit dem Mutterschiff verbunden. Nach Lösen der Bolzen vor der Landung drückt der im MECSS befindliche Push-Off-Mechanismus den Rover ab. Das Funktionsprinzip hat ebenfalls das Institut für Systemleichtbau entwickelt: eine Feder, die sich nach dem Lösen der Bolzen entspannt und so den Rover auf eine Geschwindigkeit von circa 20 cm/s beschleunigt. Danach befindet sich der Rover im freien Fall auf Phobos. Nach der Landung des Rovers, dem Aufrichten und Entfalten der Solarmodule beginnt der wissenschaftliche Teil der Mission.
Mittlerweile sind alle Strukturbauteile ausgeliefert; der Rover ist integriert und qualifiziert. Im November 2023 wird der Einbau auf dem Mutterschiff stattfinden. Der Start in Richtung Marssystem ist für September 2024 geplant.